DepthImage
A depth image.
The shape of the components.TensorData must be mappable to an HxW tensor.
Each pixel corresponds to a depth value in units specified by meter.
Components components
Required: TensorData
Optional: DepthMeter, Colormap, FillRatio, DrawOrder
Shown in shown-in
- Spatial2DView
- Spatial3DView (if logged under a projection)
API reference links api-reference-links
Examples examples
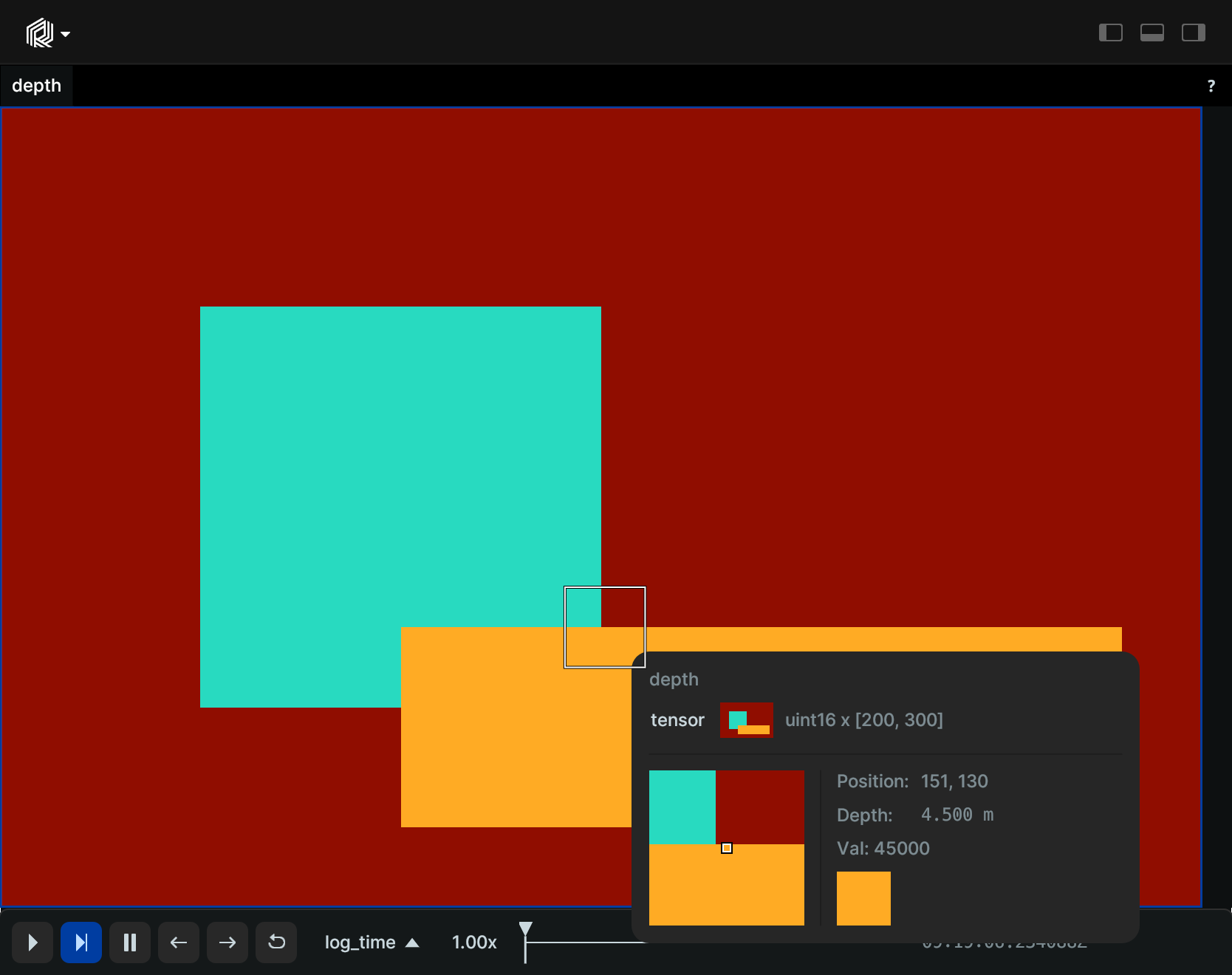
Simple example simple-example
"""Create and log a depth image."""
import numpy as np
import rerun as rr
depth_image = 65535 * np.ones((200, 300), dtype=np.uint16)
depth_image[50:150, 50:150] = 20000
depth_image[130:180, 100:280] = 45000
rr.init("rerun_example_depth_image", spawn=True)
# Log the tensor, assigning names to each dimension
rr.log("depth", rr.DepthImage(depth_image, meter=10_000.0))
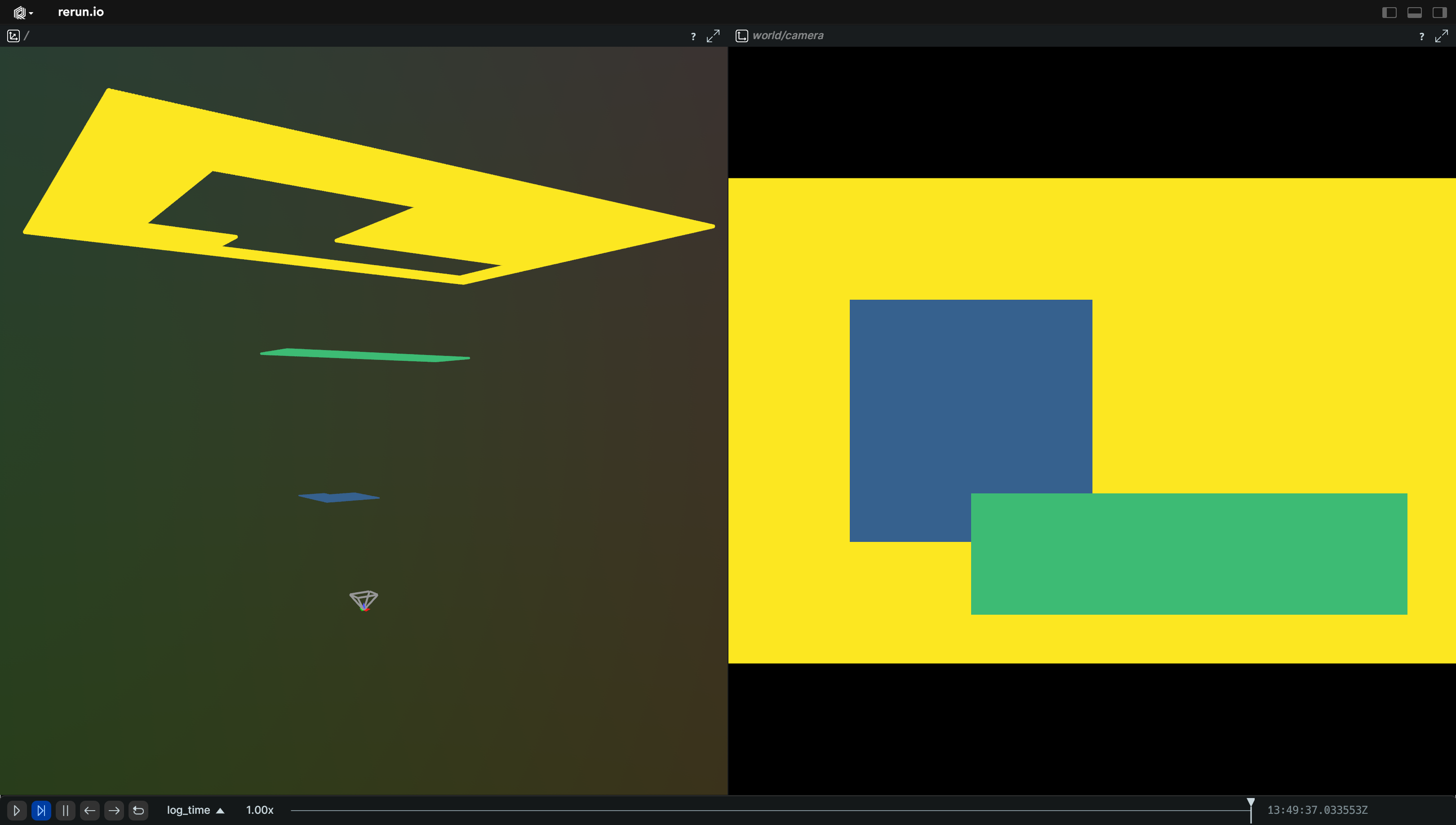
Depth to 3D example depth-to-3d-example
"""Create and log a depth image and pinhole camera."""
import numpy as np
import rerun as rr
depth_image = 65535 * np.ones((200, 300), dtype=np.uint16)
depth_image[50:150, 50:150] = 20000
depth_image[130:180, 100:280] = 45000
rr.init("rerun_example_depth_image_3d", spawn=True)
# If we log a pinhole camera model, the depth gets automatically back-projected to 3D
rr.log(
"world/camera",
rr.Pinhole(
width=depth_image.shape[1],
height=depth_image.shape[0],
focal_length=200,
),
)
# Log the tensor.
rr.log("world/camera/depth", rr.DepthImage(depth_image, meter=10_000.0, colormap="viridis"))